The New Era of Miniature Space Exploration

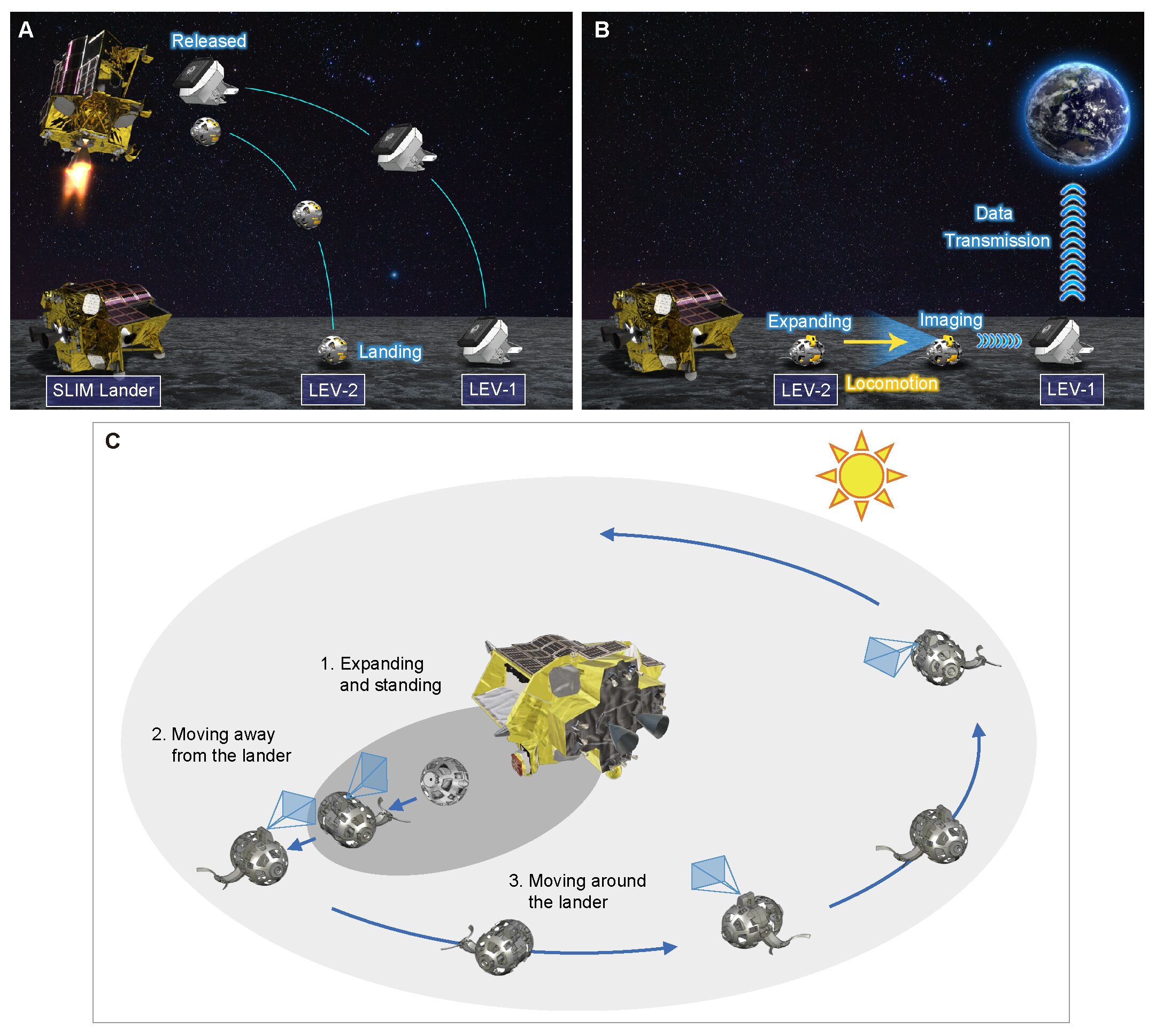
This technological feat was demonstrated when the Japanese Smart Lander for Investigating the Moon (SLIM) touched down on the lunar surface in 2024. During this historic event, a tiny rover named LEV-2—affectionately nicknamed SORA-Q—deployed onto the lunar surface to conduct a fully autonomous exploration for nearly two hours.
The Paradox of Ultra-Compact Vehicles

An ingenious design inspired by the world of toys
To overcome the limitations imposed by the landing module’s size, the Japanese space agency, JAXA, made the innovative decision to partner with the famous toy manufacturer TOMY. From this unexpected collaboration emerged a rover capable of altering its own physical structure during the mission. The designers drew direct inspiration from ball-shaped toys that can transform into small wheeled vehicles.
Once the structure was open, an ingenious mechanism sprang into action. The robot’s wheels rotated around an axis deliberately offset from its center of gravity. This design choice, directly inspired by an innovation developed by the toy manufacturer TOMY, greatly helped the rover gain traction and move efficiently across the loose, powdery lunar soil.
A Dual-Track Communication Strategy
This second robot, equipped with more powerful communication equipment, served as an indispensable relay station. The LEV-1 module took on the heavy task of transmitting the information collected by its smaller partner directly to the mission control center, thereby ensuring the success of the transmission chain without depleting the explorer robot’s resources.
A resounding success for miniature robotics
The data reported by the scientific team in their official publication highlight a remarkable technological achievement. Although this small machine’s operational lifespan was limited, it functioned for approximately 108 minutes before communications were permanently lost. During this very short period, the robot managed to send important high-resolution images of the lander and its surroundings.
The device’s performance demonstrates the undeniable advantages of miniature space robotics for the future. The team describes this success in detail in the source article, explaining: “LEV-2 … carried out autonomous lunar exploration by navigating around the SLIM lander, capturing images of the SLIM lander and its environment, and transmitting selected images … without relying on ground-based teleoperation.”
The findings from this mission pave the way for new design approaches for international space agencies. As the authors of the analysis point out, the experiment confirms the viability of small intelligent systems: “This study has demonstrated that autonomous surface operations can be carried out using extremely compact robotic platforms.”
Source: phys.org
How a Small, Transformable Rover Inspired by Japanese Toys Explored the Moon on Its Own